2011
Now updated with new Processor.

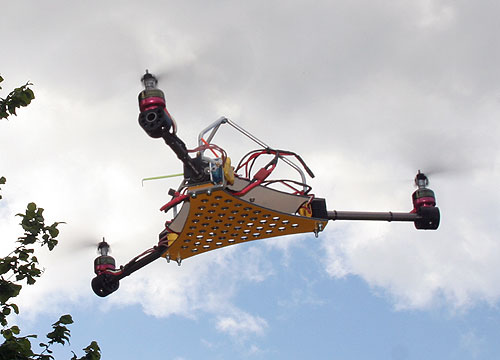
Built in a similar way to the Quad.
The rear boom rotates via a servo to enable yaw.
Full Spec:
FR CW FL CCW
Rear CW
Firmware = UAVX-V1.768gke-18F2620-16
Motor to Centre = 270mm
Receiver : Spektrum AR6000
TX : Spektrum DX7
Motor = 2410-09 840KV Outrunner Brushless Motor (Red)
ESC = Robotbirds 12A
Props = epp1045
Gyro= 3x ADSRX300
Compass = HMC6352
Accel = LIS3LV02DQ
Baro = none
LM3480 and capacitors fitted to reduce to 3.3v
Weight: 762g